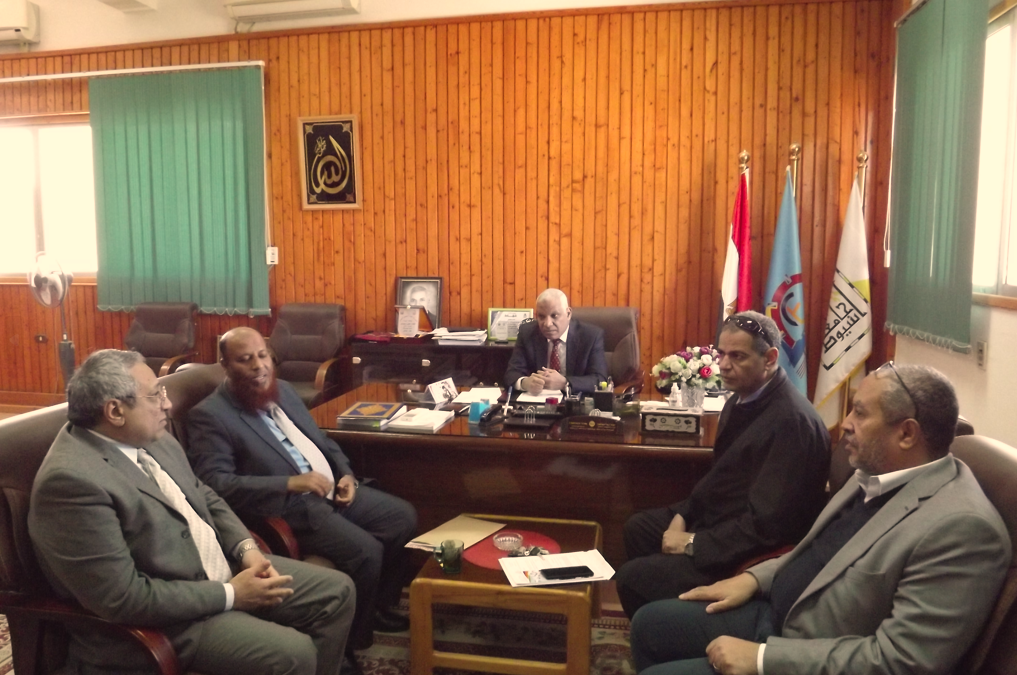
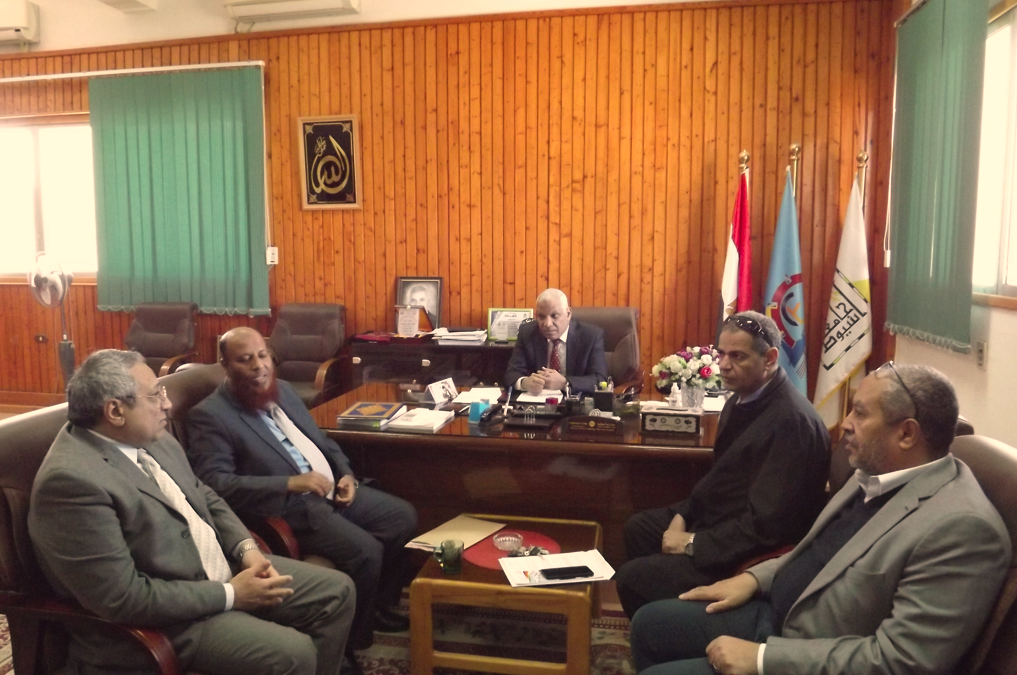
Today, Sunday, February 4, Dean of the College, Mr. Prof. Dr. Nobi Muhammad Hassan, received in his office Dr. Salem Saleh Ba Momen, Dean of the College of Engineering and Petroleum, Hadhramaut University in Yemen, in the presence of Mr. Prof. Dr. Izzat Abdel Moneim, Vice Dean of the College for Education and Student Affairs, and Mr. Prof. Dr. Muhammad Safwat, Vice Dean of the College for Community Service Affairs; With the aim of enhancing mutual cooperation between the two parties; In academic and research fields.
Address the meeting; Discussing ways of joint cooperation between the two sides through: Opening new areas of cooperation and faculty exchange.
His Excellency stressed the importance of continuing cooperation between the two sides. In implementing a number of joint scientific projects in the future.
For his part, Dr. Salem Saleh expressed; Expressed his happiness with this visit; For the Faculty of Engineering at Assiut University, stressing its excellence at the educational, academic, and research levels, praising - also - the distinguished study programs it offers, in which the study focuses on modern sciences and advanced scientific specializations that qualify young people for the current labor market.
Dr. Nobi Mohamed Hassan was accompanied by Dr. Salem Saleh Bamamoun; On an inspection tour of the College of Engineering, in the presence of the college deputies and a number of faculty members, it included: inspecting the college’s departments, workshops, and laboratories, expressing his admiration for the college and its academic and research activities, which provide the latest educational systems that keep pace with the successive development in engineering sciences. And the needs of the labor market in the engineering field.
#إعلام_كليةالهندسة_جامعةأسيوط