The Department of Architecture announces the holding of research seminars on Sunday, May 4, 2025.

The Department of Architecture announces the holding of research seminars on Sunday, May 4, 2025.
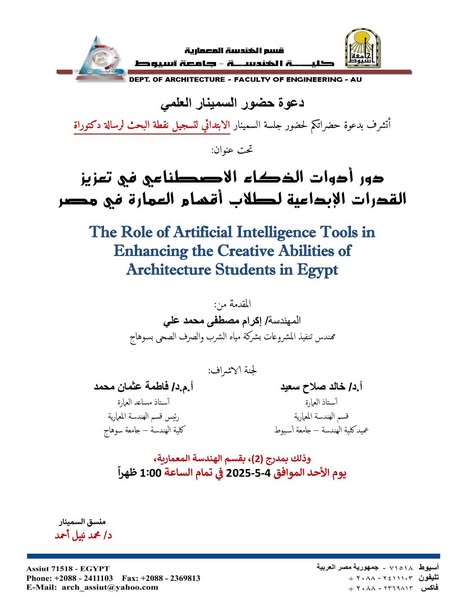
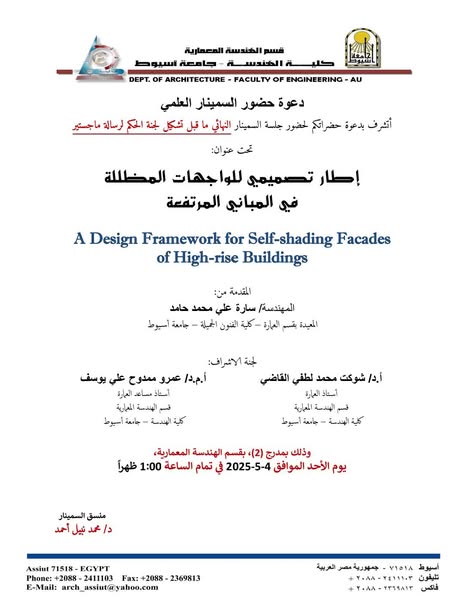
The Department of Architecture announces the holding of an initial seminar to record the research point (PhD) for Engineer Ikram Mustafa Mohamed, a doctoral student in the department. The department also announces the holding of a final seminar prior to the formation of the evaluation committee for the master's thesis of Engineer Sara Ali Mohamed, a teaching assistant at the Faculty of Fine Arts, Assiut University.
This will be held on *Sunday*, May 4, 2025, at 1:00 PM, in the auditorium of Professor Abdel Moneim Hassan Kamel in the Department of Architecture.






 بالانابة عن ادارة الكلية وجميع منتسبيها، ينعي الاستاذ الدكتور خالد صلاح عميد الكلية الاستاذ الدكتور اسامة الجنايني .. الاستاذ المتفرغ بقسم هندسة التصميم الميكانيكي والإنتاج بالكلية.. ويتقدم بخالص التعازي والمواساة لأسرة الفقيد، ولجميع منتسبي اقسام الهندسة الميكانيكيةبالكلية.
بالانابة عن ادارة الكلية وجميع منتسبيها، ينعي الاستاذ الدكتور خالد صلاح عميد الكلية الاستاذ الدكتور اسامة الجنايني .. الاستاذ المتفرغ بقسم هندسة التصميم الميكانيكي والإنتاج بالكلية.. ويتقدم بخالص التعازي والمواساة لأسرة الفقيد، ولجميع منتسبي اقسام الهندسة الميكانيكيةبالكلية.