First semester make-up exam schedule (2004 regulations) and (2021 regulations) for the academic year 2025/2026 Read more about First semester make-up exam schedule (2004 regulations) and (2021 regulations) for the academic year 2025/2026 جدول إمتحانات تخلفات الفصل الدراسي الأول ( لائحة 2004م ) و ( لائحة 2021م ) للعام الجامعي2025/2026م 23 November 2025
Exam schedule for the fourth year, first semester of the academic year 2025/2026 Read more about Exam schedule for the fourth year, first semester of the academic year 2025/2026 جدول امتحانات الفرقة الرابعة للفصل الدراسي الأول من العام الجامعي 2025/2026م 23 November 2025
Third Year Exam Schedule for the First Semester of the Academic Year 2025/2026 Read more about Third Year Exam Schedule for the First Semester of the Academic Year 2025/2026 جدول امتحانات الفرقة الثالثة للفصل الدراسي الأول من العام الجامعي 2025/2026م 23 November 2025
Second Year Exam Schedule for the First Semester of the Academic Year 2025/2026 Read more about Second Year Exam Schedule for the First Semester of the Academic Year 2025/2026 جدول امتحانات الفرقة الثانية للفصل الدراسي الأول من العام الجامعي 2025/2026م 23 November 2025
First Year Exam Schedule for the First Semester of the Academic Year 2025/2026 Read more about First Year Exam Schedule for the First Semester of the Academic Year 2025/2026 جدول امتحانات الفرقة الأولى للفصل الدراسي الأول من العام الجامعي 2025/2026م 23 November 2025
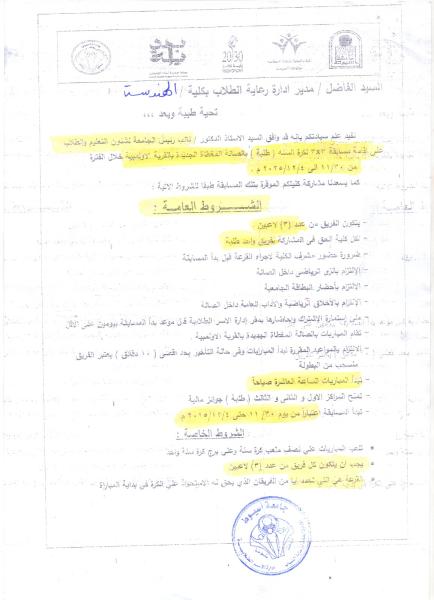
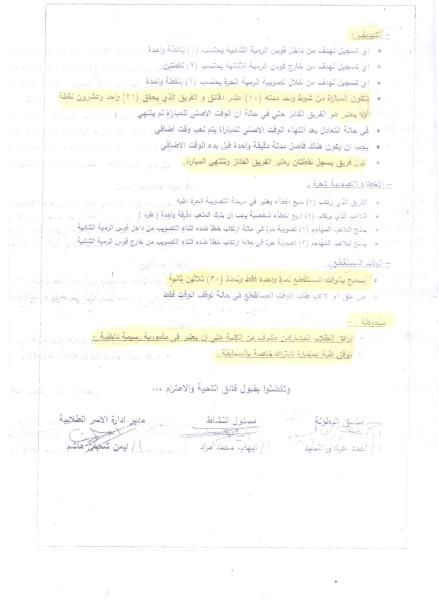
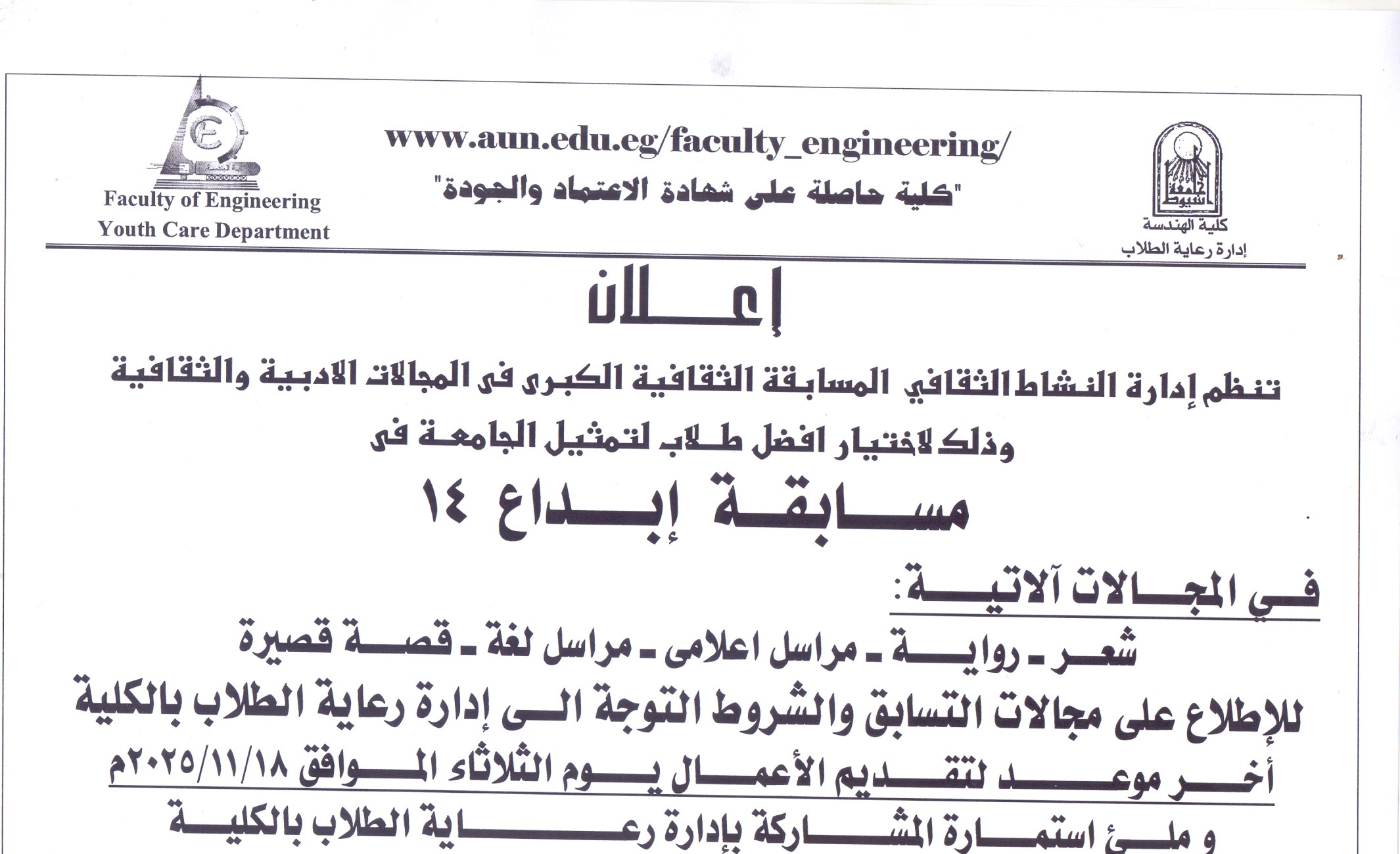
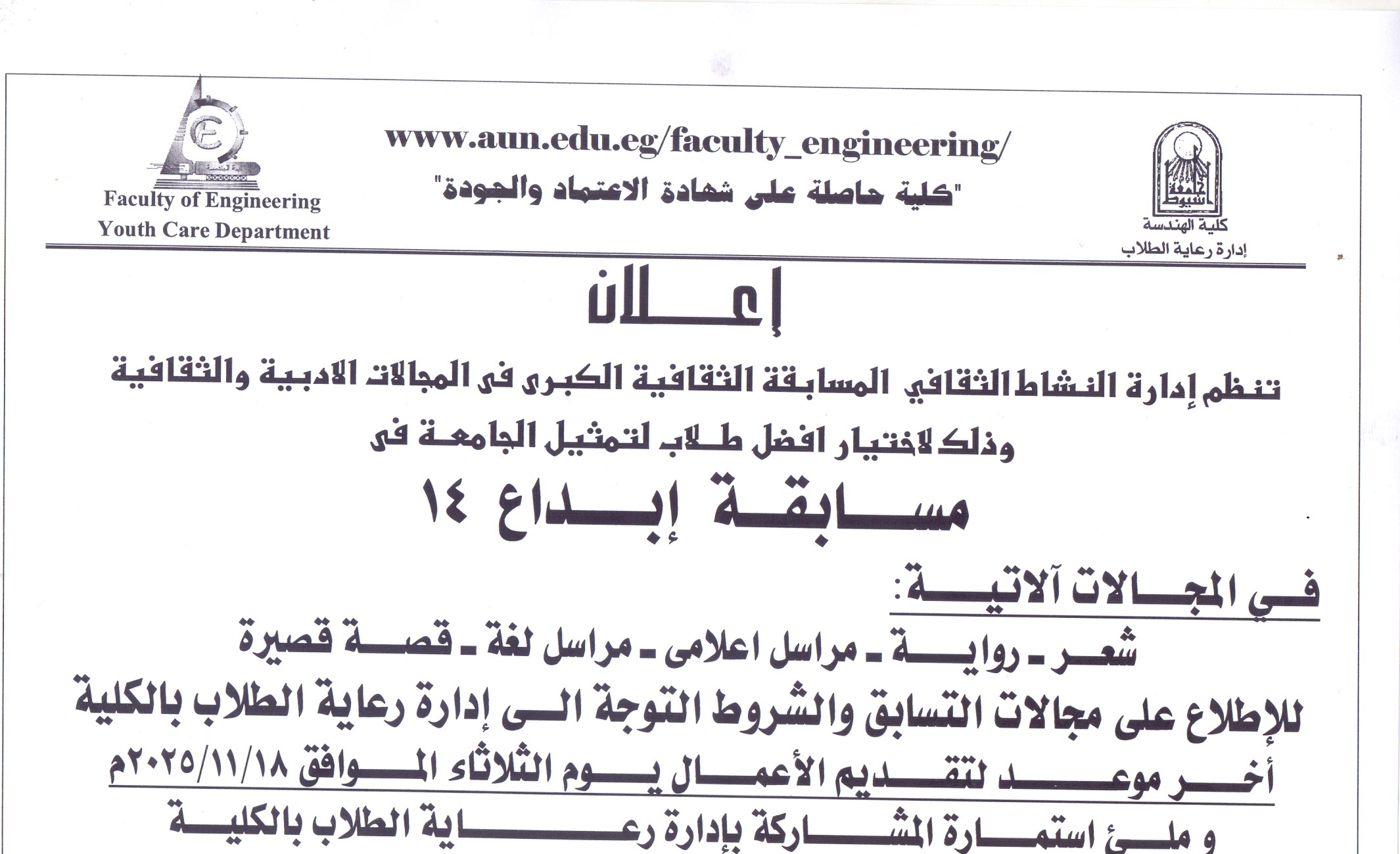
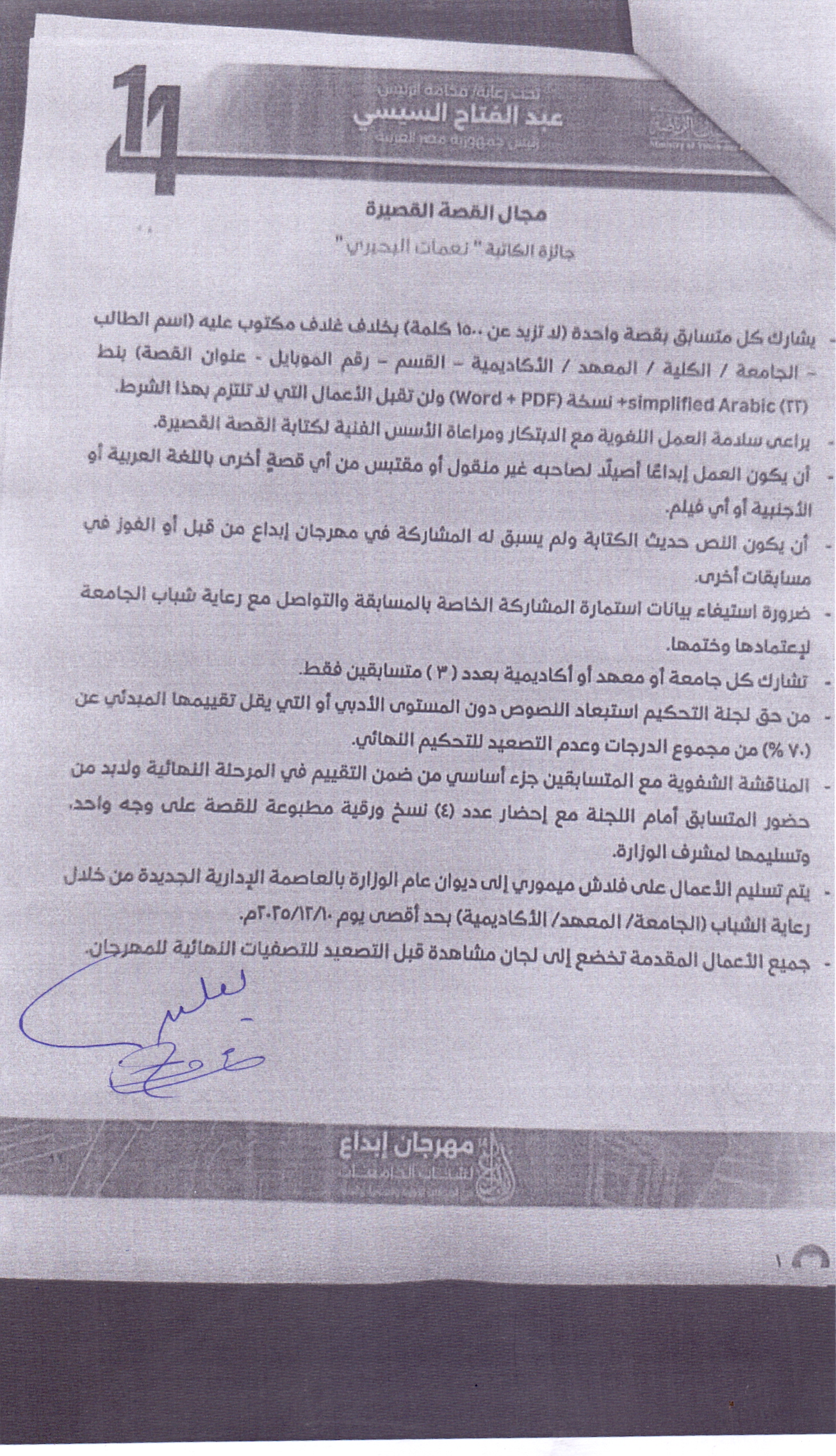
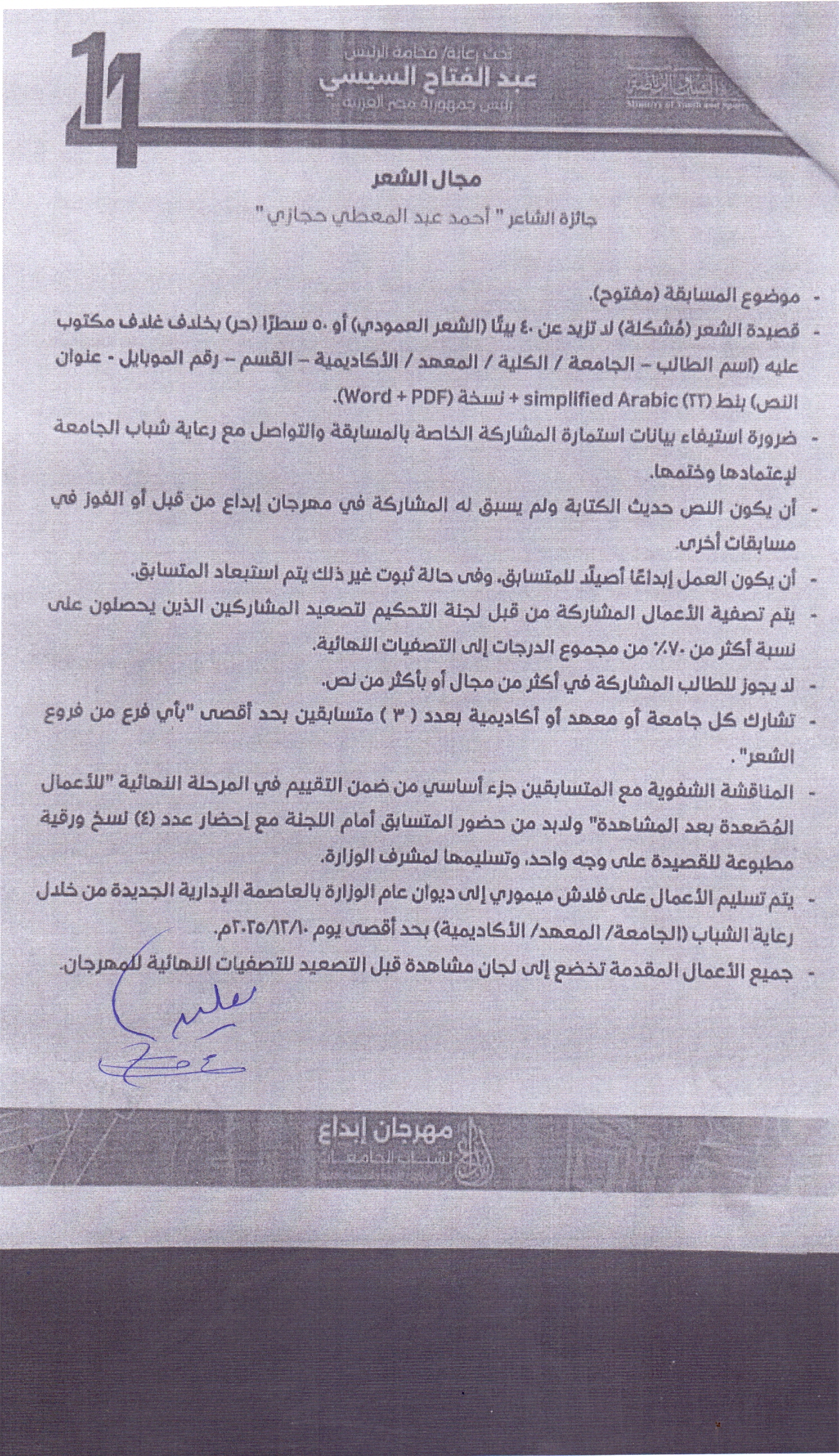
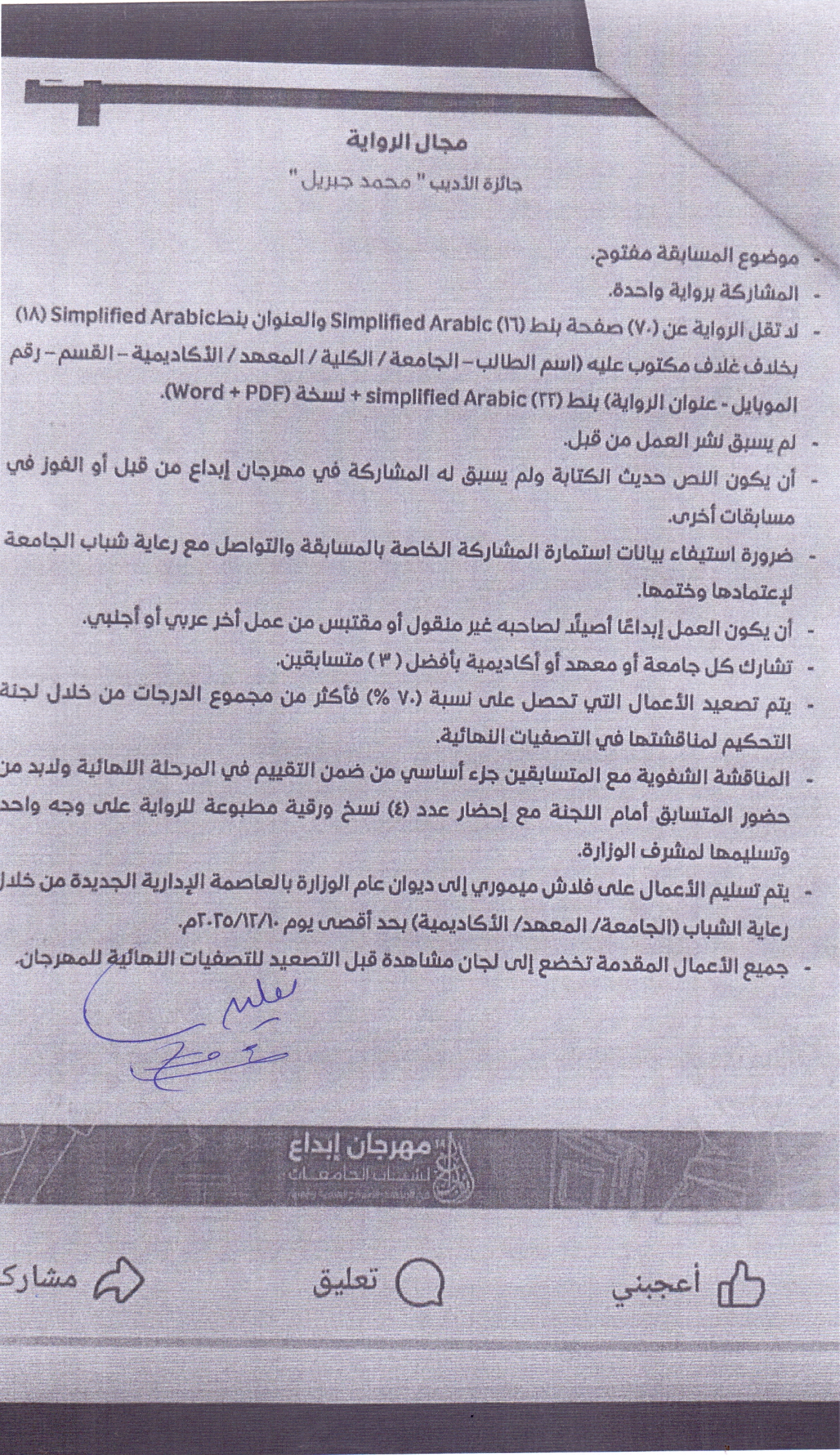
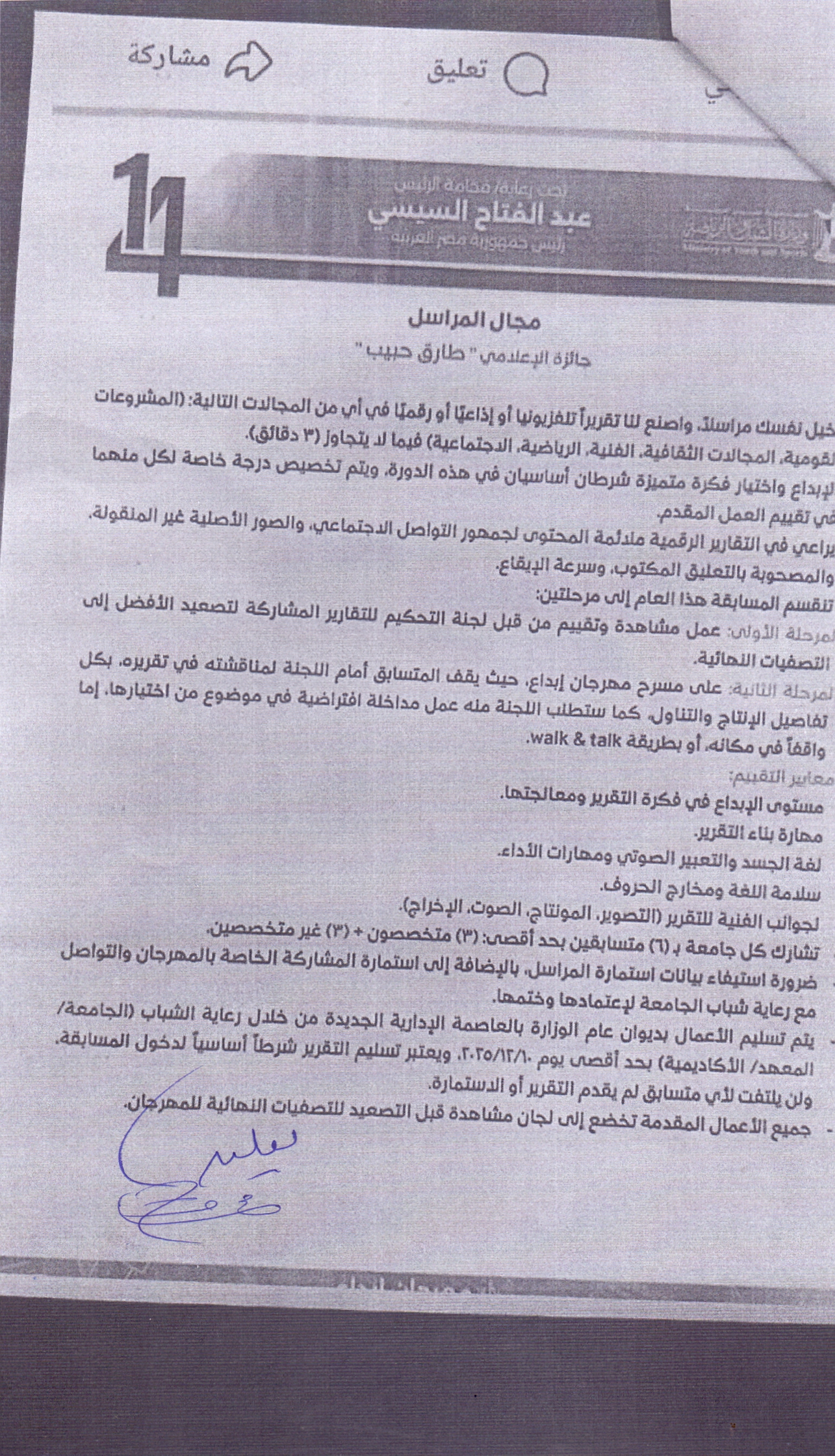
Announcement of an award for young innovators Read more about Announcement of an award for young innovators 6 November 2025