Congratulations to Professor Dr. Tayseer Hassan Abdel Hamid, Dean of the College, on the occasion of Eid al-Adha.
Invitation to discuss the Master's thesis of researcher Asaad Nasrallah Ismail, teaching assistant in the Information Technology Department
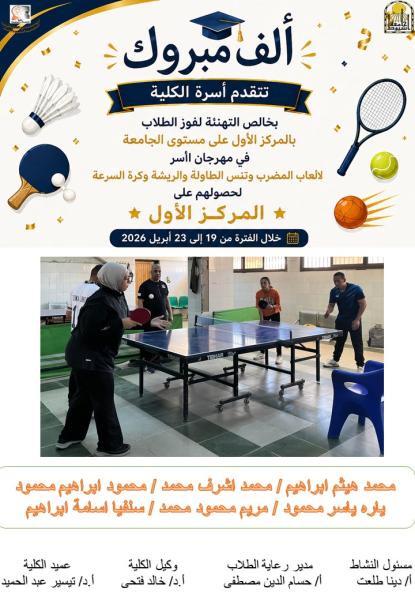
Winning first place at the university level in the Asr Festival for Racket Games, Table Tennis, Badminton and Speedball
Invitation to hold a research proposal meeting for the PhD dissertation of researcher/ Amr Magdy Rabie in the Computer Science Department
Invitation to discuss the Master's thesis submitted by researcher Suhair Ahmed Ahmed Abdel Rahim, teaching assistant in the Computer Science Department


The College's Family Committee announces a wall magazine competition (written and illustrated) for male and female students of the college.

Under the patronage of Professor Dr. Tayseer Hassan Abdel Hamid (Dean of the College)
and Professor Dr. Khaled Fathi Hussein (Vice Dean for Education and Student Affairs),
the College's Student Families Committee announces a wall magazine competition (written and illustrated) for male and female students on the following topics:
📌 Electronic Gambling |
📌 Energy Conservation
📅 Dates: From April 26, 2026 to May 5, 2026.
📍 To participate and learn about the terms and conditions:
Please contact the Student Activities Coordinator at the Student Welfare Department.
Student Welfare Department:
👤 Activity Coordinator: Dina Talaat 👤
Department Director: Hossam El-Din Mostafa
#Faculty_of_Computers #Student_Families_Activities #Student_Welfare
The Ministry of Communications and Information Technology announces the opening of registration for the second batch of the Digital Pioneers Initiative.
The Ministry of Communications and Information Technology announces the opening of registration for the second cohort of the Digital Pioneers Initiative (Digital Pioneers). The Ministry of Communications and Information Technology, in cooperation with the Egyptian Military Academy, has announced the opening of registration for the presidential initiative "Digital Pioneers," implemented in partnership with the Egyptian Military Academy. The initiative aims to provide specialized training for young people aged 18 to 32 (all age groups) from various academic and professional backgrounds and from all governorates of Egypt in a number of the most in-demand technological fields in the local and global job markets, including artificial intelligence, programming, cybersecurity, data science, and digital arts. This training is offered through a range of academic and professional programs leading to diplomas or professional master's degrees in partnership with leading local and international technology companies, as well as companies specializing in personal and language skills development and prestigious universities. The initiative offers three academic and professional programs, from which trainees can choose upon registration: an intensive diploma program (4 months), a specialized diploma program (9 months), and a professional master's program (12 months). The professional master's program comprises over 1,700 training hours and is offered in partnership with Queen's University in Canada and Universiti Sains Malaysia (USM Malaysia). It combines academic study with practical application in advanced technical fields, and students receive internationally recognized certificates. The specialized diploma program is offered in partnership with the National Telecommunications Institute (NTI), affiliated with the Ministry of Communications and Information Technology, and the Military Technical College. It includes over 1,300 training hours and features a flexible learning system that combines face-to-face instruction with e-learning. This allows participants to develop their skills according to their circumstances and obtain official certificates that enhance their competitiveness in the job market. The intensive diploma program offers over 590 training hours and is implemented in partnership with industry. It aims to equip participants with practical skills and specialized knowledge in modern technology fields through a comprehensive and intensive curriculum that combines hands-on application, interactive learning, and applied projects. The program also provides opportunities to connect trainees with the job market through partnerships with leading companies. Students receive certificates accredited by the Ministry of Communications and Information Technology and the Egyptian Military Academy, in addition to specialized international certifications, enhancing their employment prospects. This initiative offers a comprehensive training system that blends technical training, personal development, English language training, and practical training in collaboration with leading international companies. The initiative provides full board and accommodation for participants at the Egyptian Military Academy facilities (the military complex in the New Administrative Capital and the Military Academy in Heliopolis). The initiative also features physical conditioning programs and sports activities for trainees throughout the training period. It is worth noting that the Digital Pioneers Initiative was launched in 2025, in accordance with the directives of His Excellency President Abdel Fattah El-Sisi, as one of the leading national initiatives aimed at preparing and qualifying young talent for the digital job market. This contributes to supporting the state's efforts in digital transformation and enhancing digital exports as a pillar of the national economy. The initiative reflects the state's commitment to investing in human capital and its keenness to prepare a new generation of digital talent capable of leading the future, achieving sustainable development, and contributing to the growth of the digital economy. The highest standards of accuracy, transparency, and impartiality are applied in the admission procedures, which enhances public trust in the initiative and ensures the selection of the best candidates capable of making an effective contribution to the job market. To learn more about the initiative and register, please visit the initiative's website:
https://www.digilians.gov.eg/login
Important notice for graduate students
Invitation to discuss the Master's thesis of researcher / Yomna Adel Abdo Hussein

news category
Postgraduates